
















熠速重磅推出丨航空航天与国防半实物仿真测试解决方案

——航空航天与国防半实物仿真——
航空航天与国防已被中国列为战略性新兴产业,并通过《国家中长期科学和技术发展规划纲要》等政策明确其核心地位,其中低空经济与商业航天发展尤为火热,2021年《国家综合立体交通网规划纲要》首次将低空经济写入国家规划,2023年中央经济工作会议进一步明确其作为新增长引擎的地位。2025年,国家空域分类改革持续推进,低空空域逐步开放,为飞行器运行提供制度保障。商业航天方面,全国各地多个航天城等基础设施启用,卫星互联网被国家纳入“新基建”规划,从而推动了商业火箭发射、低轨星座组网等需求激增。
然而航空航天与国防装备开发与测试过程具有高度复杂性和特殊性,其核心特点主要体现在以下几个方面:
1. 系统功能构成复杂,自动化控制技术应用程度高,开发周期长;
2. 高可靠性与安全性要求:
-
零容错性:系统故障可能导致灾难性后果,测试需覆盖所有可能的失效模式;
-
冗余设计验证:对冗余系统(多套传感器、备份控制系统)进行严格测试,确保单点失效不会导致整体失效;
-
安全关键认证:需符合行业标准,通过形式化验证、故障树分析等方法确保安全。
3. 复杂系统集成与协同测试:
-
多子系统协同:涉及导航、通信、动力、武器控制等多个子系统的集成测试,需验证接口兼容性与数据一致性。
-
软硬件一体化:如飞行控制软件与飞控硬件的实时交互测试。
-
跨平台交互:测试系统与其他平台(如卫星、无人机、地面站)的互联互通性,确保信息融合与协同作战能力。
4. 极端环境适应性测试:极端物理环境模拟、极端动态环境复现;
5. 实时性与高性能需求:系统在毫秒级延迟下实时响应能力、设备在高速数据流下并发处理能力;
6. 严格的流程与合规性:全生命周期可追溯性、关键系统第三方独立验证、技术与测试数据保密与安全性;
7. 高成本与高风险性:测试资源昂贵、迭代周期长:一次测试失败可能导致数月延迟;
8. 多学科协同与创新技术应用:多学科多领域技术协作与融合、新兴技术验证。
在上述开发测试特点下,基于模型设计开发方式MBD(Model Based Development)正在被越来越多的使用,流程左侧为系统开发,右侧为系统测试验证,各环节层层相扣,开发与测试同步进行且相互追溯,通过“设计-测试-迭代”的闭环,确保系统在极限条件下的可靠运行,同时满足严苛的合规性与成本效率要求。
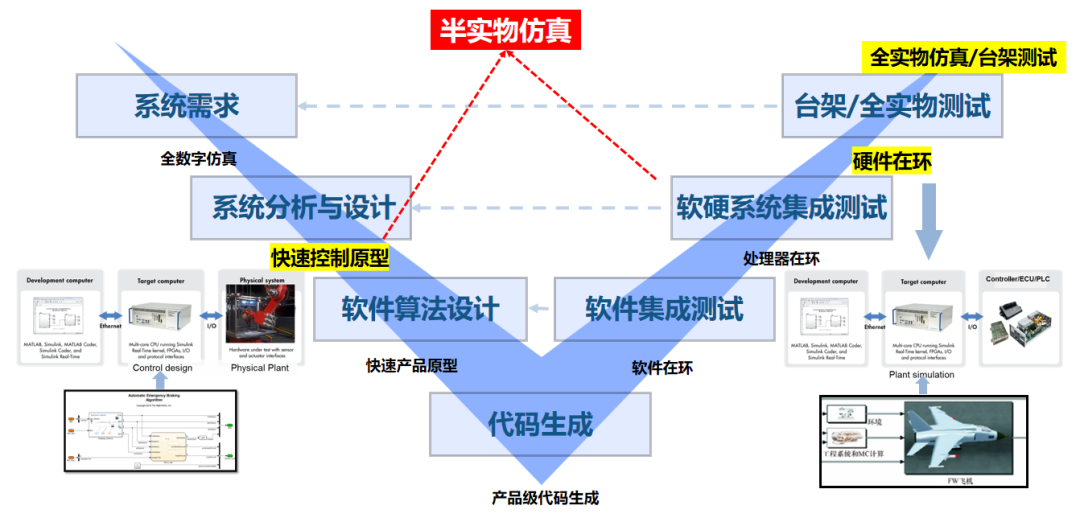
图1 MBD设计开发流程
MBD设计开发流程中,开发阶段和验证阶段都会采用半实物仿真的方式来加速产品的开发验证工作。半实物仿真按开发和验证两根阶段同样分为快速控制原型和硬件在环测试两个环节。
快速控制原型(以下简称RCP)是在控制器硬件尚未完成时,通过实时仿真设备模拟控制器与真实被控对象交互以快速迭代优化控制算法的技术。它允许在早期阶段对控制策略进行验证和优化,从而缩短开发周期并降低成本。
硬件在环仿真(以下简称 HIL)是采用实时仿真平台来模拟真实被控对象,针对开发的产品进行建模仿真,并将其运行于与真实控制器闭环工作的实时环境中,用于验证硬件和软件的性能、可靠性及安全性。在航空航天与国防领域,HIL测试是装备研发、测试和验证的核心手段,尤其适用于高风险、高成本或难以直接试验的场景。
进行半实物仿真可以给航空航天与国防系统开发带来以下典型收益:
1. 加速开发周期:
-
早期验证与迭代:半实物仿真测试允许在硬件尚未完成时,对系统进行功能验证和控制策略优化,大幅缩短开发周期;
-
并行开发:硬件和软件(如控制算法)可以同步开发和测试,减少传统串行开发的等待时间。
2. 增强系统集成测试能力,提高测试覆盖度:
-
多子系统协同测试:半实物测试可集成导航、通信、动力、武器控制等多个子系统的硬件和仿真模型,验证系统的整体性能;
-
全工况模拟测试:半实物测试可以在实验室环境中模拟各种极端复杂工况,覆盖传统实物测试难以实现的场景;
-
软硬件接口验证:通过半实物仿真测试,可提前发现并解决软硬件接口(如通讯、传感器信号、执行器控制)的兼容性问题;
-
故障注入与边界测试:可主动注入传感器、执行器、通讯总线等电气或协议层面故障信号,验证系统的鲁棒性和容错能力。
3. 降低研发成本与风险:
-
减少物理实物测试依赖:半实物仿真测试可在实验室完成大部分功能验证,减少对实物测试的依赖,大大降低测试成本;
-
避免硬件损坏风险:在虚拟环境中测试极限工况,避免因测试失误或算法隐患等导致的硬件损坏或安全事故;
-
优化资源利用:通过半实物仿真测试提前发现设计缺陷,减少后期修改成本,并优化测试资源分配。
——航空航天与国防半实物仿真组成——
航空航天与国防半实物仿真核心组成:
1. 实时仿真机:
运行实时操作系统:QNX、RT-Linux等,确保任务调度的确定性。在RCP应用中模拟控制器与真实被控对象交互,快速测试验证控制算法。在HIL应用中模拟被控对象与真实控制器交互,在各种工况下对控制器及整个系统进行测试;
2. 接口:
拟控制器和被控对象之间的真实接口与信号交互问题,确保数据同步与兼容性,同时搭配故障注入模块以实现故障工况模拟测试;
3. 外围环境模拟:
模拟真实物理环境(如运动、温度、电磁场),典型设备:多轴转台、负载模拟器、传感器模拟器等。
4. 测试软件:
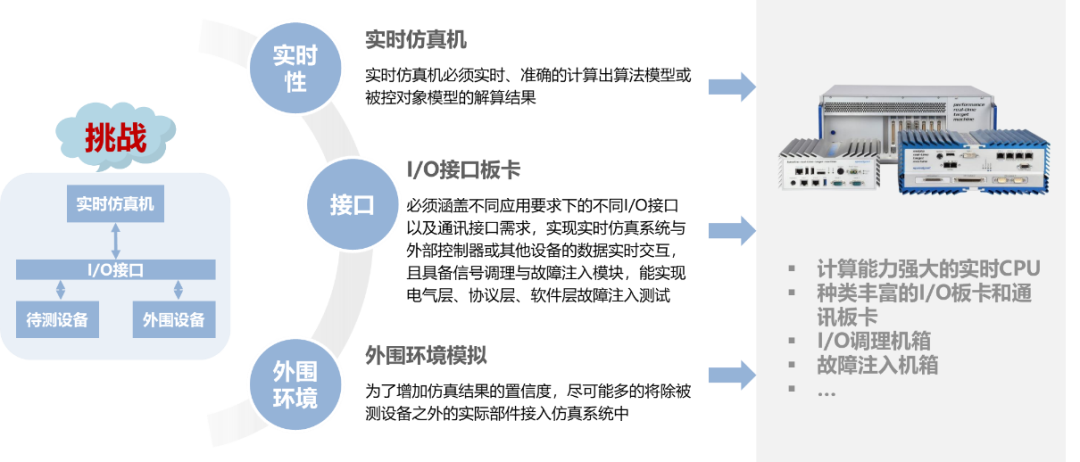
图2 半实物仿真系统组成
——典型应用场景——
飞行器飞控系统
飞控系统RCP
在飞控计算机还没设计出来之前或不具备飞控计算机时,用实时仿真平台模拟飞控计算机,通过串口、ARINC通讯、数字量、模拟量等真实接口与外部真实导航系统(地面站、GPS)、执行器(舵机)或传感器等交互,借助实时仿真平台完整的软硬件工具链,实现控制算法的快速验证迭代。

图3 飞控RCP结构图
飞控系统信号级HIL
在全物理试验或真实飞行试验之前,借助实时仿真平台模拟导航系统、执行器、传感器及飞机等设备部件,通过串口、ARINC通讯、数字量、模拟量等真实接口与外部真实飞控计算机交互,模拟各种全面复杂工况,对飞控计算机及整个系统进行测试验证。
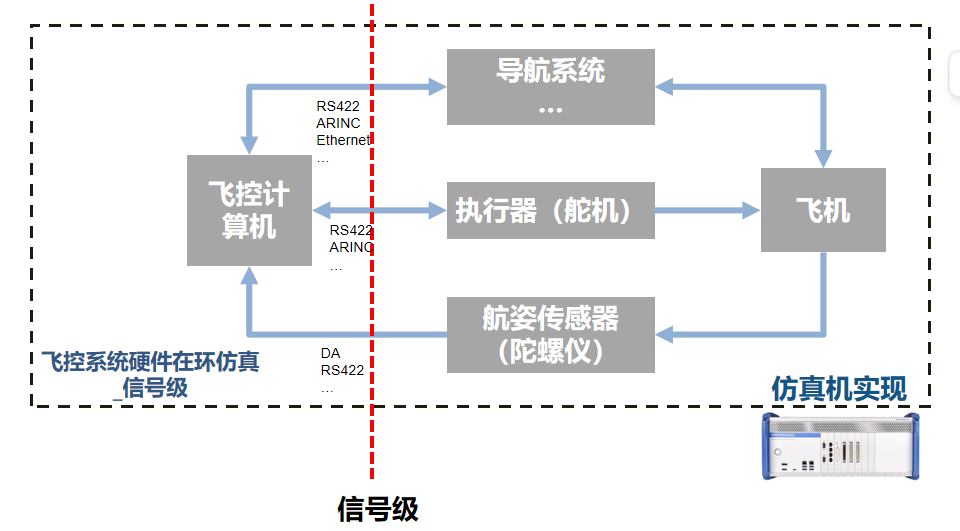
图4 飞控信号级HIL结构图
飞控系统机械级HIL
为了更真实模拟系统环境,提高半实物仿真测试可置信度,可以尽可能将系统中一些传感器、执行器用实物来代替,其余传感器、执行器、飞机等通过在实时机中实时运行对应部分模型来模拟,从而形成包含真实控制器和其他真实部件的机械级硬件在环仿真方案。

图5 飞控机械级HIL结构图
全面的飞控系统机械级硬件在环测试系统图
-
被测设备:真实飞控计算机;
-
外围附件模拟:导航系统(地面站、GPS)、舵机负载模拟器、三轴转台(实时模拟飞行器飞行姿态,上面安装有航姿传感器);
-
实时仿真机柜:实时运行解算飞机运动学、动力学模型及其他没有真实部件的传感器和执行器模型,并将飞行姿态数据实时发送给三轴转台;
-
上位机:实时调参、数据观测与记录、自动化测试等。

图6 飞控机械级HIL系统图
飞行器发动机系统
发动机快速原型测试
用实时仿真平台模拟航空发动机ECU,通过串口、ARINC通讯、数字量、模拟量等真实接口与外部真实发动机、上位指令系统、监控系统交互,实现发动机控制算法快速验证。
发动机信号级硬件在环测试
用实时仿真平台模拟航空发动机、各个传感器、执行器、监测单元等设备与真实发动机ECU交互,实现对发动机ECU和整个系统的测试验证。
发动机机械级硬件在环测试
在上述信号级硬件在环测试的基础上尽可能增加真实部件或模拟器,提高测试场景真实性,发动机机械级硬件在环仿真框架图和系统图如下:

图7 发动机机械级HIL结构图

图8 发动机机械级HIL系统图
飞行器动力系统
飞行器动力系统的发展趋势正朝着高效、环保、智能化及多技术路线并进的方向发展,目前主流的动力系统有以下三种:电动化与电池技术、混合动力与氢能技术、可持续航空燃料(SAF)。下面以混合动力系统为例详细介绍飞行器动力系统半实物仿真方案。
动力系统快速原型测试
用实时仿真平台模拟动力系统控制器,连接外部真实的发动机、发电机、BMS、逆变器、电机等真实部件测试,可以实现以下控制算法的快速测试验证:整机能量管理控制算法、BMS电池管理控制算法、电机控制算法等。
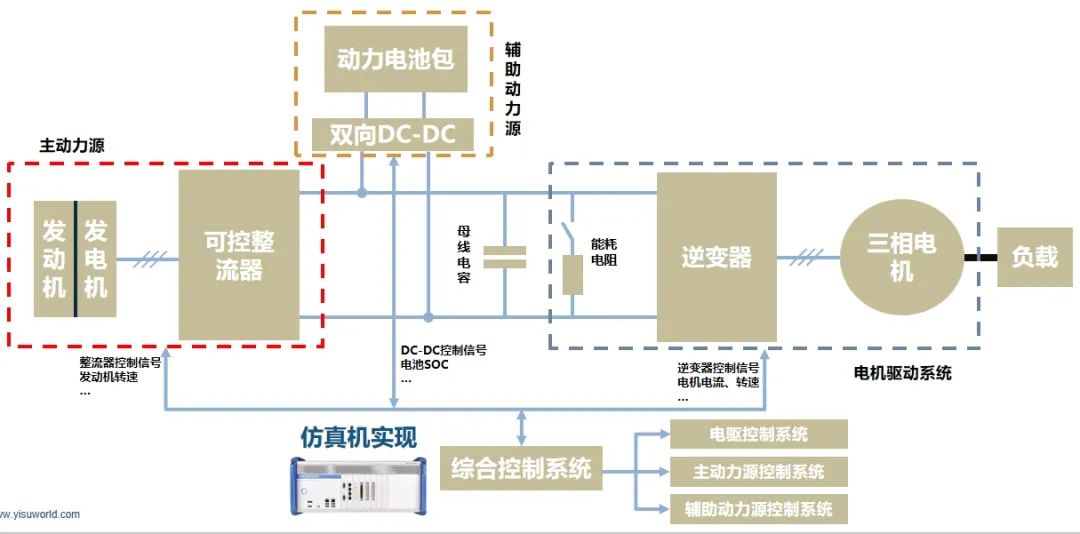
图9 新能源飞行器动力系统RCP结构图
动力系统能量管理HIL
在实时机CPU中实时运行飞行器动力系统整个拓扑结构及飞行器运动学、动力学模型(即负载模型),模拟飞行器各种运行工况对整机能量管理控制器及整个系统进行全面测试。同时系统中也可以根据用户需要集成部分真实的部件,形成功率级的测试系统。
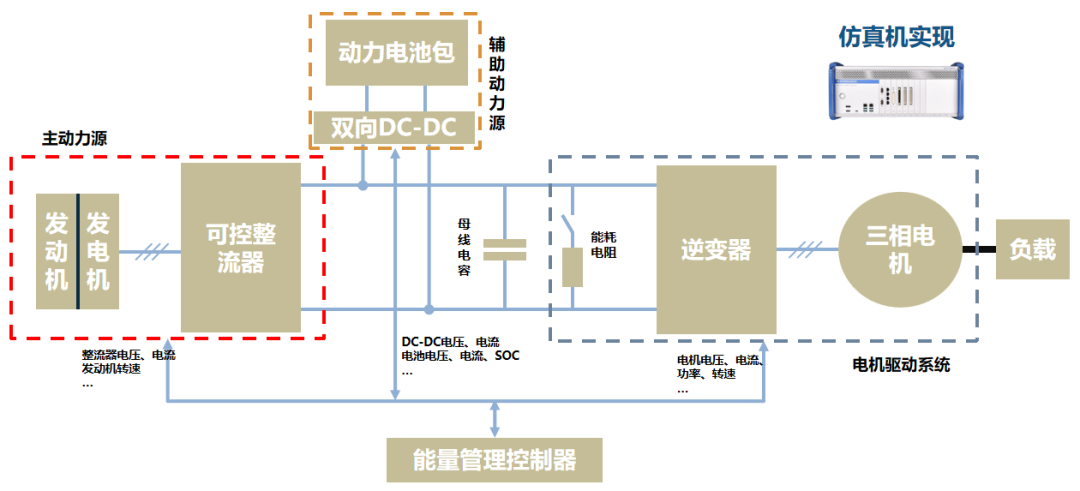
图10 新能源飞行器能量管理HIL结构图
动力系统整机HIL
动力系统整机HIL测试即同时对动力系统的各个控制器做联合HIL仿真测试,可以基于实际要仿真的系统规模用多个实时仿真平台来做整体集群仿真,如仿真机1中实时运行发动机、发电机及整流部分模型,通过真实接口连接主动力源控制器测试,实时机2中实时运行多台逆变器、电机及负载部分的模型,通过真实接口连接多个电机控制器测试,实时机3中实时运行双向DC-DC及动力电池包模型,同样通过真实接口连接辅助动力控制器测试,三台实时机之间通过反射内存或光纤通讯的方式实现同步与高速数据交换,从而实现动力系统整机HIL联合仿真。
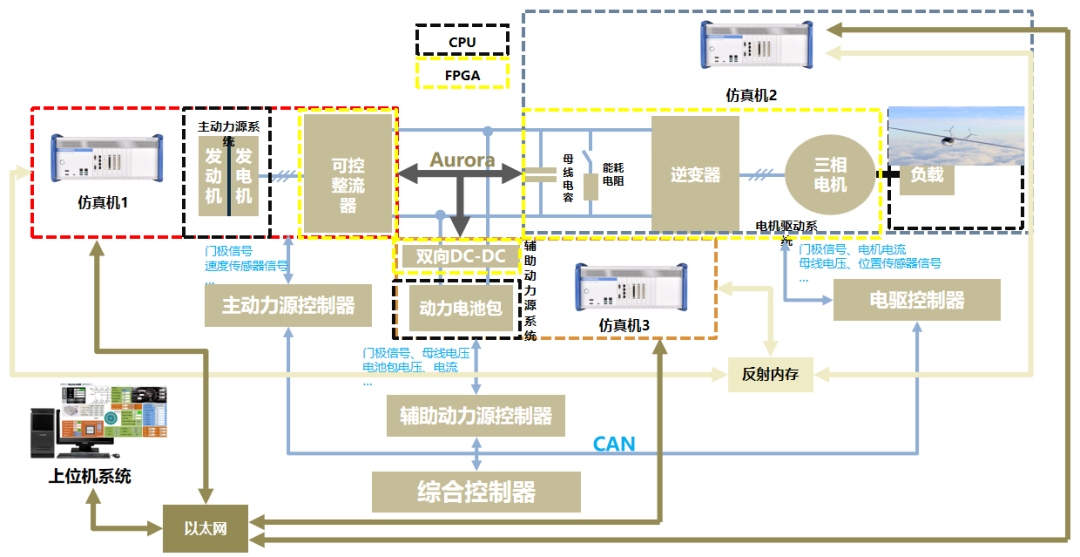
图11 新能源飞行器动力系统整机HIL联合仿真结构图
卫星姿轨控制
卫星姿轨半实物仿真中快速原型应用相对较少,大多为HIL仿真测试,其同样分为信号级HIL与机械级HIL。信号级HIL是在实时仿真平台中对卫星、各种传感器、执行器等建模仿真,通过I2C、串口、CAN、ARINC通讯等真实接口与星载计算机交互测试,系统结构相对简单。机械级HIL则是在测试系统中尽量集成如陀螺仪、星敏感器、太阳敏感器、GPS接收机、动量飞轮、喷气机构等真实或等效硬件,实时仿真平台主要运行卫星动力学、轨道学模型和剩余的传感器与执行器模型,从而组成一个包含更多真实设备的HIL系统。机械级HIL系统结构图与详细系统图如下:
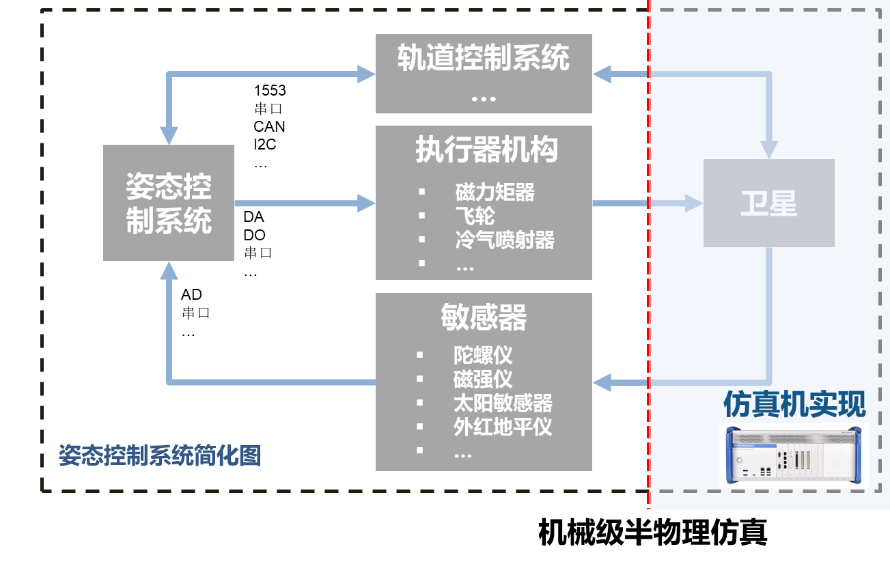
图12 卫星姿轨控制机械级HIL系统结构图
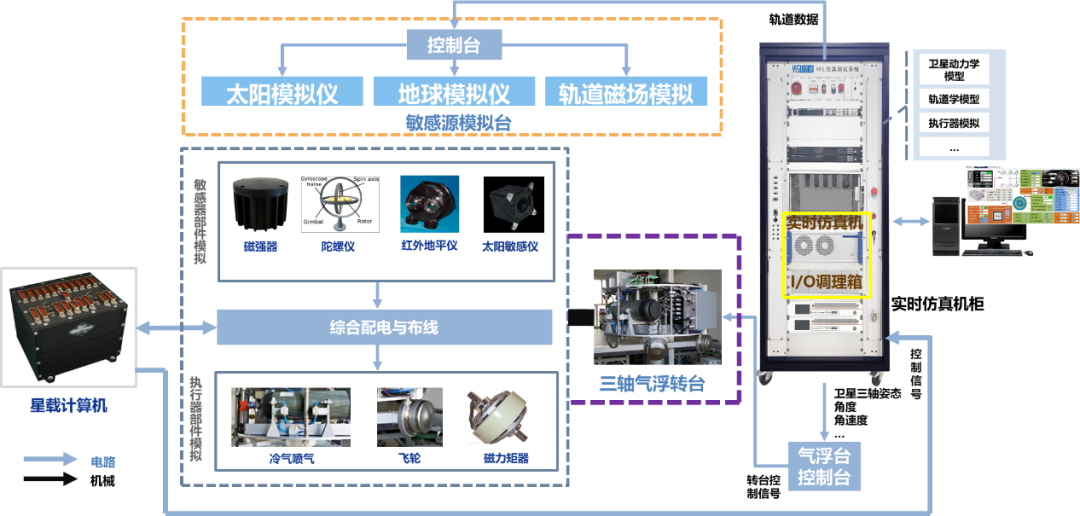
图13 卫星姿轨控制机械级硬件在环仿真系统图
制导导弹控制
制导或制导与导弹组合半实物仿真应用与飞行器飞控应用类似,快速原型RCP与信号级HIL结构相对简单,此处仅对制导与导弹组合机械级HIL仿真做相应介绍,制导与导弹组合机械级HIL会尽量将发控/遥测系统、舵机负载模拟器、航姿传感器、导引头等真实部件集成进来,实时仿真平台实时运行运行弹体运动、弹目相对运动学模型,同时系统中会通过一个5轴转台来体现目标和导引头的实时姿态,对应机械级HIL系统结构图与详细系统图如下:

图14 制导导弹机械级硬件在环仿真系统结构图
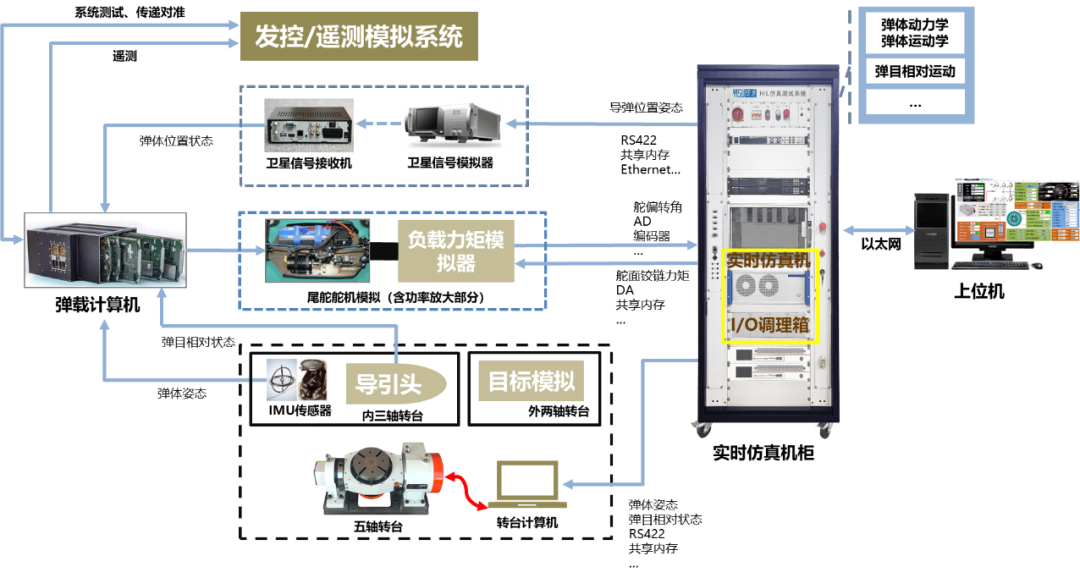
图15 制导导弹机械级硬件在环仿真系统图
除上述典型应用场景外,半实物仿真还可在飞行器航电系统、起落架系统、综合液压系统、船舶舰艇综合电控与动力系统、水下航行器等众多场景中广泛运用。
——熠速航空航天半实物仿真特点——
熠速在航空航天与国防半实物仿真领域拥有丰富的积累和实际项目案例,主要特点如下:
-
具备丰富的硬线和通讯接口及完整的软硬件工具链,能为用户提供专业的解决方案; -
系统采用半定制化模式,根据用户需求灵活配置硬件和模型开发,实现高性价比; -
系统与MATLAB/Simulink无缝衔接,支持深度学习、模型预测控制、强化学习、自动驾驶、机器人系统等诸多Simulink工具箱,用户可快速的部署运行开发的控制算法,有效地提高算法开发和验证效率。 -
支持最新版MATLAB/Simulink,便于用户利用MATLAB/Simulink最新功能或算法快速构建自己的模型,加速新技术新功能在项目中的快速运用; -
半物理仿真系统所有硬件均在Simulink模型中图形化配置,使用方便,上手简单,对新手很友好; -
FPGA板卡开发方式采用基于Simulink的图形化开发方式,无需了解传统的硬件描述语言与FPGA底层硬件知识,开发使用便捷; -
熠速具备众多FCU、BMS、电机、微电网、电力电子等实际项目经验,且具备完整整机系统模型,能为飞行器动力系统测试验证提供全面解决方案。

关于熠速
上海熠速信息技术有限公司,2017年3月成立于中国上海,是一家持续和快速成长的高新技术企业,2022年底获得国家“高新技术企业”证书。
熠速围绕嵌入式系统开发和测试,为用户提供硬件在环仿真系统(HIL)、快速控制原型(RCP)、电机控制算法开发、嵌入式数据库等覆盖各类控制器的解决方案。
目前熠速在北京、成都、广州、深圳都设有分公司,服务当地片区客户。熠速坚持“以客户为中心、为客户创造价值”的宗旨,第一时间为您提供优质且专业的服务!
网址:www.yisuworld.com
电话:021-64886750
电子邮件:info@yisuworld.com




