
















不管是军用还是民用,无人驾驶技术都表现出了巨大的潜在市场需求。由于可以独立完成操作,而不依赖于人类,无人驾驶技术提供了一套独特的解决问题的方法。
维拉诺瓦大学完成了两个无人驾驶项目,一个是国际无人驾驶汽车系统协会举办的无人驾驶船舶比赛,另一个是 和亚特兰大大学合作的无人驾驶船舶挑战赛。
目标任务
为了完成这两项比赛,项目组需要完成推力测试和巡航控制,比赛船只需要自行穿过水面上由浮标标记的两道门,所以参赛船只需要完成障碍物探测和避障,标志识别和自动入港,以及水下声呐定位等功能。此外,参赛船只还需要保持和服务器的通信,以及基本的安全。
维拉诺瓦大学的参赛船只主要使用激光雷达和摄像头来完成对环境的感知和检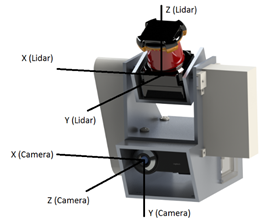 测。
测。
实时导航
参赛船只需要实时的处理来自外界的各种信号,无延时的持续进行导航。Speedgoat的移动实时目标机被用来完成这些功能。
如果不能实时的实现控制算法,船只将会很容易滑出赛道。该项目当中采用的实时系统提供了丰富的IO接口和通信接口,实时的采集船只的传感器信号并作出响应,包括惯性测量单元,GPS 信号,指南针等的采集和控制。




