
















MCU RCP系统解决方案
一、技术背景
随着技术不断突破,新能源汽车电驱系统需同时面对高精度动态响应、功能安全冗余和多域协同兼容性三大技术挑战,MCU系统的测试与验证需求也随之呈现爆发式增长,详情请参考《MCU HIL测试系统解决方案》。
二、快速控制原型的迫切需求
在电气化与智能化深度融合的趋势下,电机控制算法的复杂性显著提升,传统瀑布式开发模式已陷入瓶颈,难以满足快速迭代需求。
RCP技术通过集成高精度电机控制算法运算模块、功率器件控制单元及多通道传感器信号采集接口,构建了一套完整的电驱系统开发平台,以此支持控制算法的快速验证与优化,为新一代电驱系统的研发提供了高效解决方案。
在控制系统开发中,RCP(快速控制原型)与HIL(硬件在环)技术作为实时仿真的两大核心应用,犹如一对兄弟,在算法验证与系统测试中扮演着互补的角色。HIL技术通过在仿真机中构建虚拟环境,安全高效地测试真实控制器(如MCU)的功能与性能。
而RCP技术则截然相反,它将控制算法(如FOC矢量控制、弱磁调速算法)快速部署到高性能硬件平台(如多核CPU或FPGA),实现了从算法模型设计到硬件实时验证的无缝衔接。这一技术大幅缩短了开发周期。
快速控制原型(RCP)的核心优势:
|
1 |
高效迭代:无需硬件开发和代码编写、调试,支持控制参数的在线调优,将算法优化周期从周级压缩至天级; |
|
2 |
全面验证:可实现从单电机控制到多系统协同的全工况覆盖测试; |
|
3 |
成本优化:针对不同验证项目,不需要重新进行控制器设计,在开发早期阶段即进行大量测试,降低控制算法设计缺陷的可能性。 |
三、MCU RCP系统的分类和结构
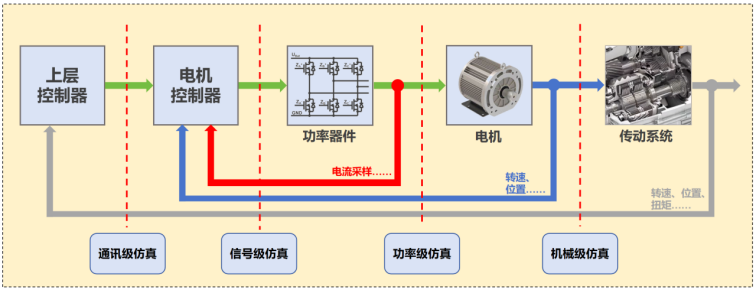
参考MCU控制系统的仿真架构,RCP系统也可分为四种:通讯级、信号级、功率级和机械级。其中在控制器开发中主要使用前两种,即通讯级和信号级仿真。

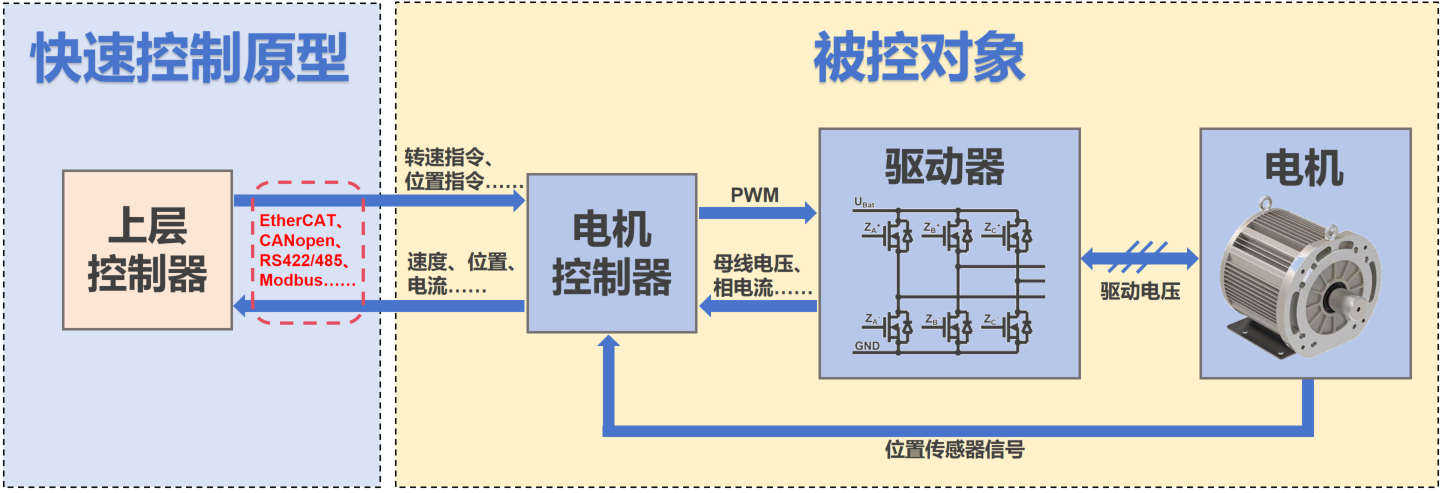
通讯级RCP需求
常见于机器人多电机的协同控制,无人机轨迹规划等场景。在此应用中,实时仿真机运行上层控制算法,并通过通讯协议给底层电机控制器下发控制指令,同时回读速度、位置、电流等信号。
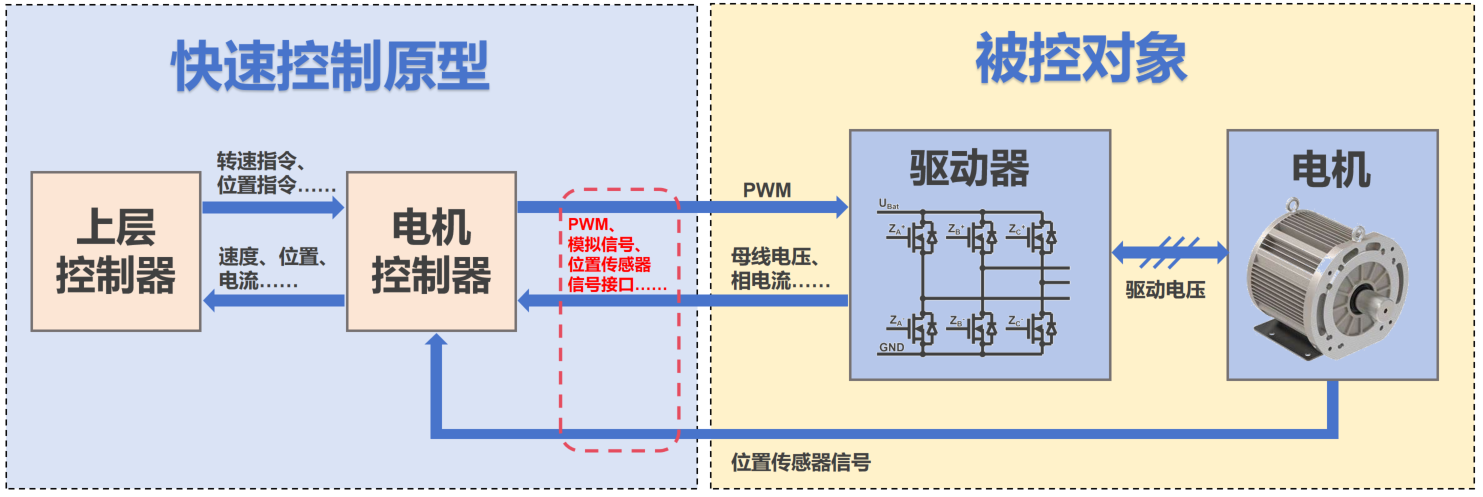
信号级RCP需求
常见于电机电流环、转矩环等电机控制算法开发的场景。在此应用中,实时仿真机采集电流、电压、位置等信号,通过电机控制算法计算,输出PWM控制信号给外部的真实被控对象,形成控制闭环。

四、实时仿真机
RCP实时仿真机在硬件架构上与HIL实时仿真机基本一致,但其功能定位存在显著差异:RCP实时仿真机主要用于运行控制算法,因此其IO接口与HIL系统完全相反。
为满足不同级别RCP控制的多样化需求,实时仿真机需具备丰富的IO接口类型,以充当“万能控制器”的角色,适配不同项目的算法开发。这种设计不仅需要支持多种信号类型和通信协议,还需确保灵活性与可扩展性。
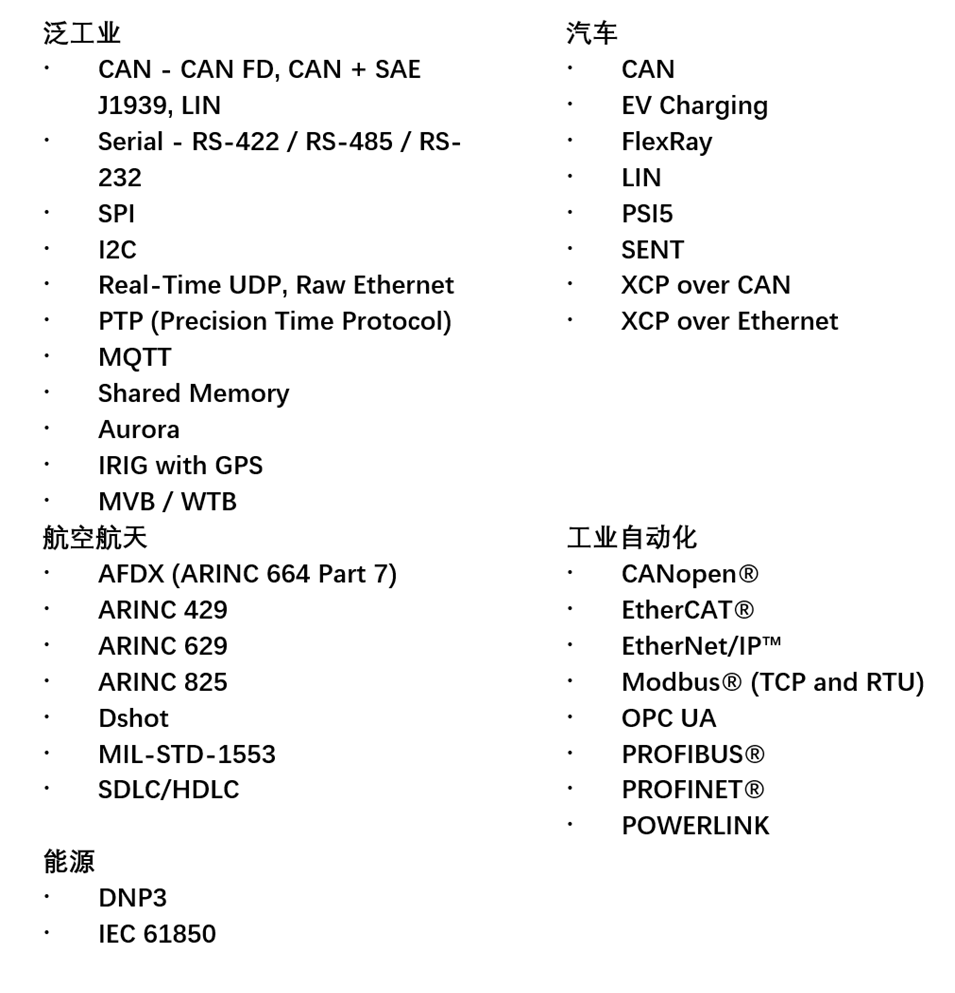
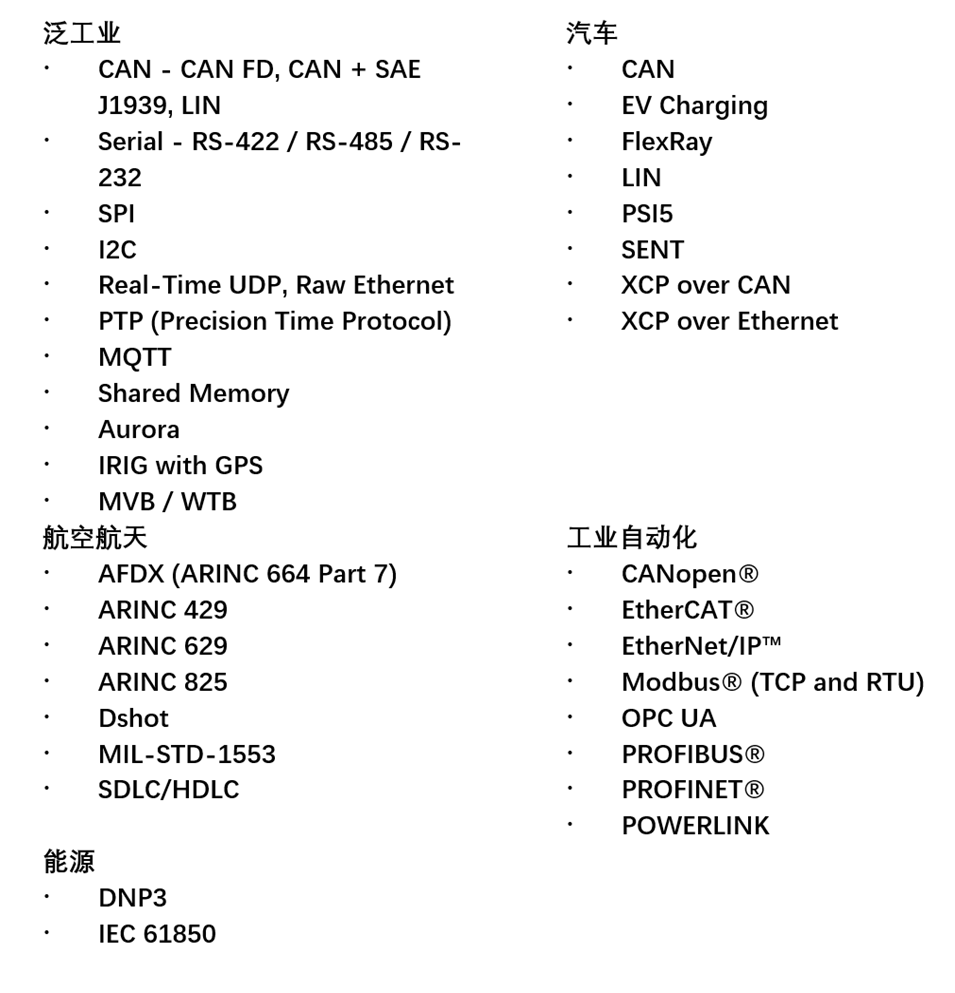
针对这一点,熠速提供的RCP方案包含百余种IO模块,支持CAN、CAN FD、EtherCAT、SPI、I2C等总线协议,以及PWM、DIO等数字信号接口,确保灵活性与兼容性。通过模块化设计和高性能硬件架构,该方案实现了从模型设计到实机验证的无缝衔接,显著提升算法开发效率。
针对信号级接口需求,由于需要输出高频的PWM控制信号,以及解析位置传感器的信号,所以对于信号频率的要求非常高。熠速提供的方案中,通过FPGA模块来实现这些接口功能。
各领域常用的信号接口如下
五、电机控制算法模型库
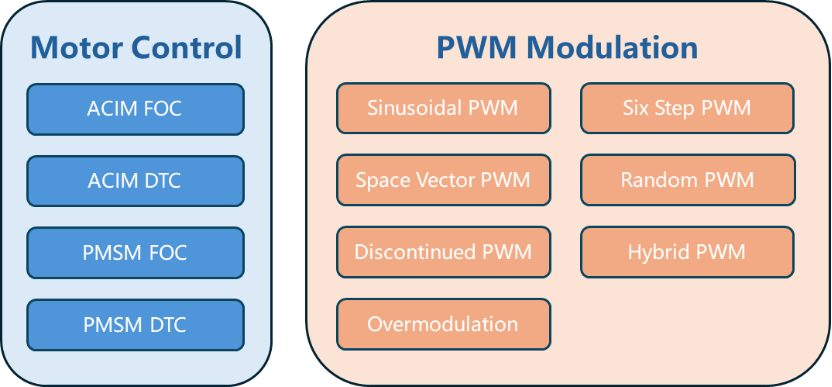
为了更好的服务用户,熠速开发了基于Simulink的高性能电机控制算法模型库,分为电机控制和PWM调制两大核心部分。
电机控制部分涵盖ACIM FOC、ACIM DTC、PMSM FOC和PMSM DTC四种算法,分别针对交流感应电机和永磁同步电机提供高效控制策略;PWM调制部分则集成了正弦波PWM、六步PWM、空间矢量PWM等多种调制技术,支持从基础应用到高端优化的全场景需求。
针对其他类型的算法模型需求,熠速拥有一支经验丰富的专业模型开发团队,为客户提供高效、精准的定制化开发服务。

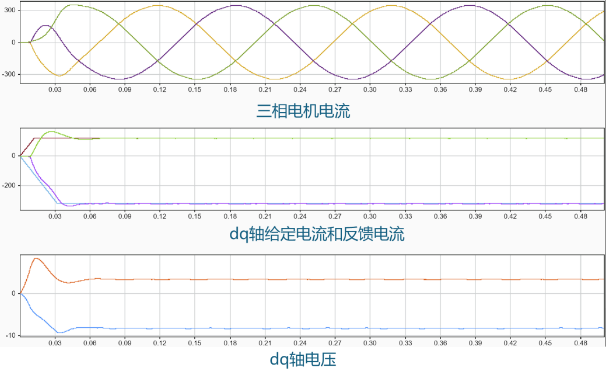
以高精度的死区补偿算法为例,在10kHz PWM和2us死区时间的情况下,考虑死区补偿前后的仿真波形对比,如下所示。
添加死区补偿前:
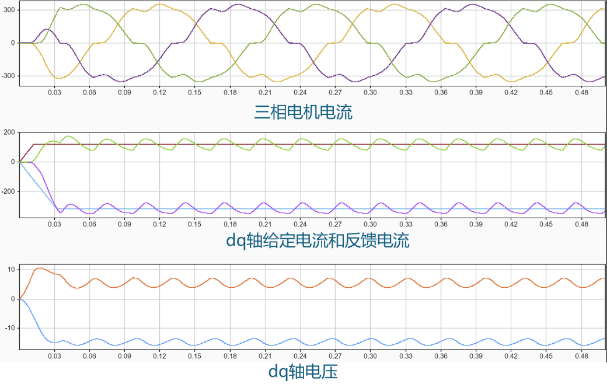

添加死区补偿后:

如何联系我们?
上海熠速信息技术有限公司
地址:上海市松江区九亭镇九新公路877号临港卓越科技园2号楼4层
电话:15733612908
电子邮件:xiaochun.hao@yisuworld.com
网址:www.yisuworld.com




