-
应用场景
行业解决方案
-
实时仿真用户案例
Crank-嵌入式GUI设计和开发用户案例
021-64886750
-
实时目标机
Simulink模型库
Demo套件
info@yisuworld.com
HDL Coder工作流程
 借助于MathWorks的HDL Coder,FPGA可以用来获取和产生高频信号,模拟被控对象,运行控制和信号处理算法。
借助于MathWorks的HDL Coder,FPGA可以用来获取和产生高频信号,模拟被控对象,运行控制和信号处理算法。
常见应用包括:
- 20 kHz至1 MHz的闭环速率,例如用于电机控制和模拟、功率转换和电池系统
- 高速模拟信号的预处理,例如通过应用滤波器,或存储大量数据,并仅对闭环控制使用平均值或采样值
- 视觉数据的预处理,例如分析和存储数据,然后在需要时为闭环提供输入
- 最终的嵌入式目标使用FPGA或ASIC:FPGA上的原型因此简化了向嵌入式平台的迁移
考虑到FPGA的大规模并行特性,并且由于处理完全可以在FPGA本身上完成(消除PCIe总线延迟),因此实现了非常快的闭环采样率。CPU仍然可以用于配置和监控,甚至可以用于协处理设置,包括从FPGA到FPGA的快速DMA数据传输。
使用HDL Coder在Speedgoat Simulink可编程的FPGA I/O模块上运行Simulink®设计可减少开发时间,并使您能够在过程的早期模拟和验证算法。此工作流程还减少了硬件本身的开发周期:
- 自动生成HDL代码并综合浮点或定点Simulink模型
- 自动构建实时应用程序并将其下载到Speedgoat目标机中安装的FPGA I/O模块
- 通过单击按钮即可实时运行应用程序,同时还具备日志数据、监视和优化参数功能
请注意,对于某些Simulink模块,可能有浮点和定点支持限制。HDL Coder的浮点支持是IIR滤波器、切线、分段和任何难以收敛的反馈回路等算法的理想选择。定点实现通常更适合于FIR滤波器、FFT和NCO/混频器等算法。
硬件要求
- 带一个或多个可编程FPGA的Speedgoat实时目标机
软件需求
- MATLAB、Simulink、MATLAB Coder™、HDL Coder、Simulink Coder™、Simulink Real-Time™
- Xilinx Vivado
- 用于Simulink可编程FPGA I/O模块的Speedgoat HDL Coder Integration Package(HCIP)
2020年3月30日 18:26
ꄘ浏览量:0
-

电力电子(含控制器和被控对象模型)
凭借多年在电力电子行业累积的经验和能力,我们为用户提供控制器模型和被控对象模型,包括标准库以及定制化服务。¥ 0.00立即购买
-

轨道交通(含控制器和被控对象模型)
凭借多年在轨道交通行业累积的经验和能力,我们为用户提供控制器模型和被控对象模型,包括标准库以及定制化服务。¥ 0.00立即购买
-
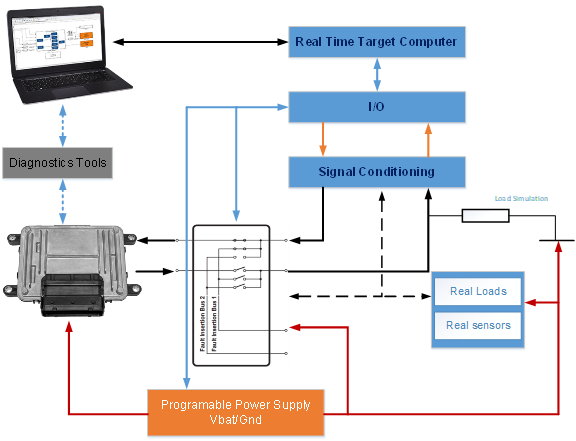
信号调理系统
在HIL测试中,硬件在环设备起到模拟被测ECU被控对象的作用。需要根据ECU的PIN脚信息,模拟相应信号。这类设备的核心为实时系统,实时系统会提供相应IO通道,处理信号的产生和采集。但这类IO通道一般为标准规格,比如数字通道为TTL规格,模拟通道只是测电压等;这与被测ECU所需的信号规格有较大差异,故需要一套信号调理系统,负责两者之间信号的转接。¥ 0.00立即购买
-

电机控制Demo套件
使用Simulink和Speedgoat转动无刷直流电机。¥ 0.00立即购买




实时目标机
仿真测试应用场景
学习与支持

关注熠速微信公众号
仿真测试解决方案
I/O接口模块
通讯协议模块
FPGA技术
被控部件仿真
Simulink模型库
Demo套件
测量测试解决方案