
















ZKW Lichtsysteme GmbH专注于新一代车辆的创新和优质照明系统和电子产品。作为系统供应商,他们是世界上汽车工业行业的战略合作伙伴之一,设计和生产照明和电子模块。
项目描述
ZKW正在开发用于大灯系统的复杂投影技术,以动态改变照明。它基于对大量按特定几何顺序排列的LED的单独控制。 每个LED都有自己的特定照明空间,所有空间的组合会产生整个光分布。
这项技术包含前照明系统(AFS)和无眩光远光灯(GFHB),可实现行驶中光束自适应调整功能。
此外,可通过动态控制LED实现车灯弯曲,从而模拟车灯布置机械旋转的效果。
所有软件算法,作为结构化的灵活模块,最终在运行在大灯外部的ECU上。 核心软件模块用于控制和执行底层任务,例如与所有LED交互。
为了满足客户新的要求,其中之一的软件模块必须是重新开发。 新的模块需要读取信号要求的光束方向,旋转角度,以及(如果适用)无眩光的目标位置的远光灯区域。
有了这些信息,软件周期性计算当前投射系统中每个参与发光的LED的亮度值。 因此,它可以实现随着时间的自适应和动态变化。
要开发一个可快速验证的原型产品,ZKW意识到通过手写C代码不是正确选择。他们需要的是灵活的原型开发平台,进而可以在此平台上轻松地进行调整,测试和改进新的控制设计。 因此,他们选择使用Speedgoat快速控制原型平台,使他们能够使用Simulink对控制算法建模并易于把模型自动生成的代码部署到Speedgoat目标机上。
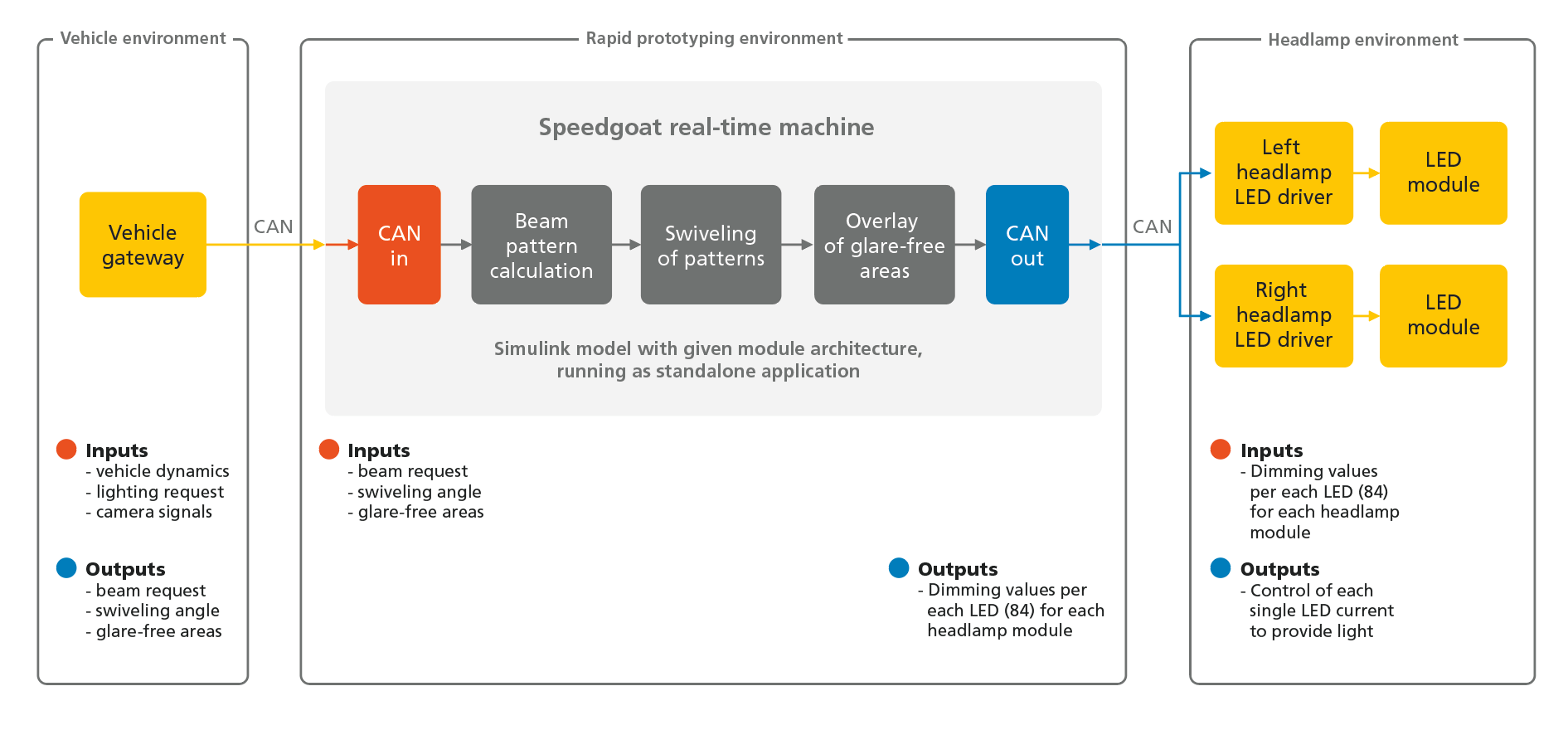
选择的移动式实时目标机被放置在专用测试车内部用作控制原型。 为了将目标机接入车辆网络,ZKW工程师利用Speedgoat提供的Simulink CAN接口模块搭建了网关。
此网关来接收枢轴输入信号,例如请求的光束方向图,旋转角度和无眩光区域,这些信号是从车辆动力学获取,还有照明请求和摄像头信号。 这些信号通过使用Speedgoat驱动程序模块反馈给模型。
ZKW将Simulink模型作为独立应用程序部署到目标机上。 最后,移动式实时目标机放入开发车辆中,以连接前照灯并控制各个LED。
在夜间驾驶期间,模型的修改大部分是通过本地模拟完成的,然后再更新独立应用程序。
使用Speedgoat解决方案的另一个好处是ZKW工程师能够轻松访问记录的数据并将其可视化,从而评估如何改变控制算法以达到期望改进目标。
基于模型的设计的好处
根据ZKW的说法,使用Speedgoat和MathWorks产品的最大优势之一是它们可以在数小时内而不是数天的时间内调整和部署算法,从而节省了大量的开发时间。 此外,使用Simulink Coder™自动生成代码消除了代码错误的风险。
Speedgoat强大的实时硬件系统提供了足够的处理资源,使ZKW工程师能够进一步开发和优化算法,而不必担心计算能力是否足够。

将来,ZKW正在考虑使用移动式实时目标机来覆盖其他开发车辆中不同传感器的使用,以确认自适应前照灯的传感器融合功能。
传感器将使用TCP / IP数据包通过以太网连接,Speedgoat移动式实时目标机将控制前照灯系统。
通过这套系统,ZKW希望提取关于目标物和车辆环境的信息,以使前照灯系统以更加动态的方式运行。
使用的Speedgoat产品
- 移动式实时目标机
- IO601 CAN模块
使用的MathWorks产品
- MATLAB®
- Simulink®
- MATLAB Coder™
- Simulink Coder™
- Simulink Real-Time™





