
















永磁同步电机控制系统仿真系列文章——控制器模型(4)
本文是关于控制器模型的第4篇文章,主要讨论FOC控制算法的Simulink模型。
关于整个系统文章的内容请参考第一篇文章:
—— FOC算法 ——
FOC(Field Oriented Control)磁场定向控制,也称是Vector Control矢量控制。电机的磁场通常包括三种,定子磁场,气隙磁场,转子磁场。对于永磁电机控制最常用的定向方式就是转子磁场定向,将选择坐标系的d轴定在转子永磁体的N极。
此外,对于PMSM的控制都是建立在与转子磁通同步旋转的dq轴坐标系的,得到数学方程
式中
|
名称 |
描述 |
单位 |
|
ud, uq |
d轴电压和q轴电压 |
V |
|
id, iq |
d轴电流和q轴电流 |
A |
|
φd, φq |
d轴等效磁链和q轴等效磁链 |
Wb |
|
φM |
转子永磁体磁链 |
Wb |
|
Rs |
定子电阻 |
Ohm |
|
Ld, Lq |
d轴等效电感和q轴等效电感 |
H |
|
ω |
转子旋转电角速度 |
rad/s |
|
p |
极对数 |
—— |
通过控制PMSM的d轴电流和q轴电流来控制电机的转矩。通过控制逆变器的输出电压来控制电机的d轴电流和q轴电流。控制框图如下[1],给定d轴电流和q轴电流,通过电流控制器控制电机实际的d轴电流和q轴电流跟随给定值变化。电流控制器的设计方法很多,在此不再累述。
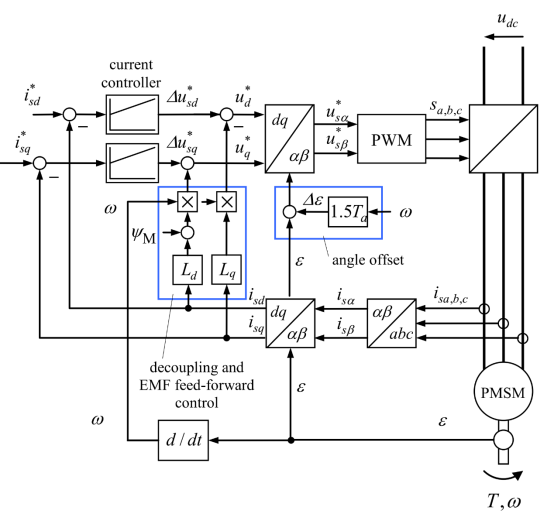
FOC控制框图
对于各个环节的信号的波形可以参考下图[2],
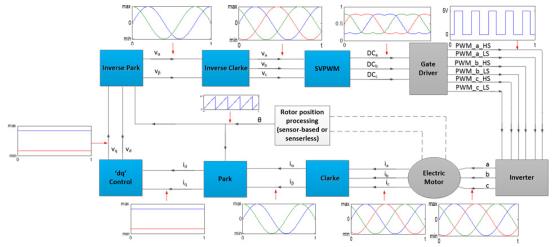
FOC控制信号示意图
由于输入是三相静止坐标系下的三相电流,需要通过Clarke和Park变换至dq轴同步坐标系下,此外在dq轴同步坐标系下电流控制器输出的dq轴电压也需要通过Clarke和Park逆变换至三相静止坐标系。
关于Clarke Transform和Inverse Clarke Transform请参考MATLAB帮助文件的链接,一般情况下我们都是使用幅值守恒变换。
https://ww2.mathworks.cn/help/physmod/sps/ref/clarketransform.html
https://ww2.mathworks.cn/help/physmod/sps/ref/inverseclarketransform.html
关于Park Transform请参考MATLAB帮助文件的链接,一般情况下我们都是使用d轴与α轴对齐。
https://ww2.mathworks.cn/help/mcb/ref/parktransform.html
https://ww2.mathworks.cn/help/mcb/ref/inverseparktransform.html
—— FOC算法的Simulink模型 ——
Simulink模型如下:
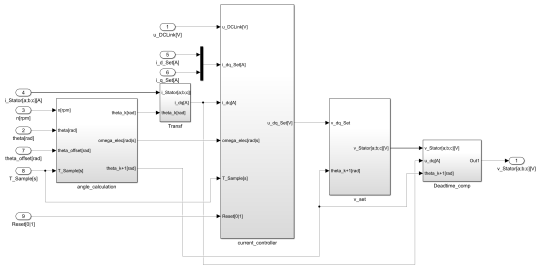
FOC算法的Simulink模型
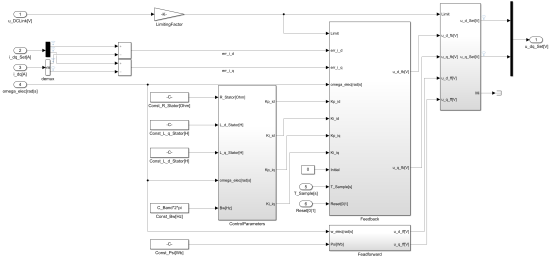
Current Controller的Simulink模型
——参考文献——
[1] Joachim Böcker. “Controlled Three-Phase Drives.” Universität Paderborn LEA Lecture Notes Last Update 13.07.2012.
[2] 周末. “原理解析 | Field Oriented Control(磁场定向控制)的 Simulink 实现.” 微信公众号:MATLAB.




