
















VCU HIL测试系统解决方案
一、VCU技术背景
整车控制器(Vehicle Control Unit,VCU)作为新能源汽车的核心控制单元,在整车电子电气架构中扮演着中枢神经系统的角色。与传统的发动机电子控制单元(Engine Control Unit, ECU)相比,VCU在电动化架构中承担着更为复杂的多系统协同控制任务,其功能范围从单一的动力系统控制扩展至整车层面的综合管理。

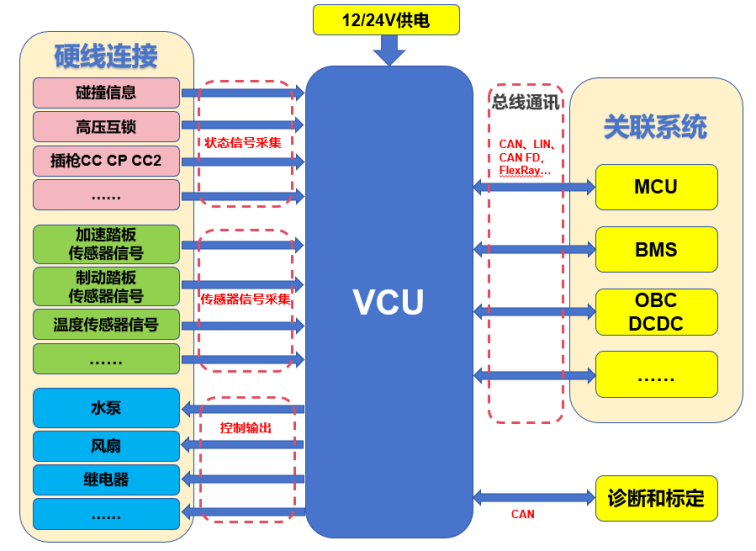
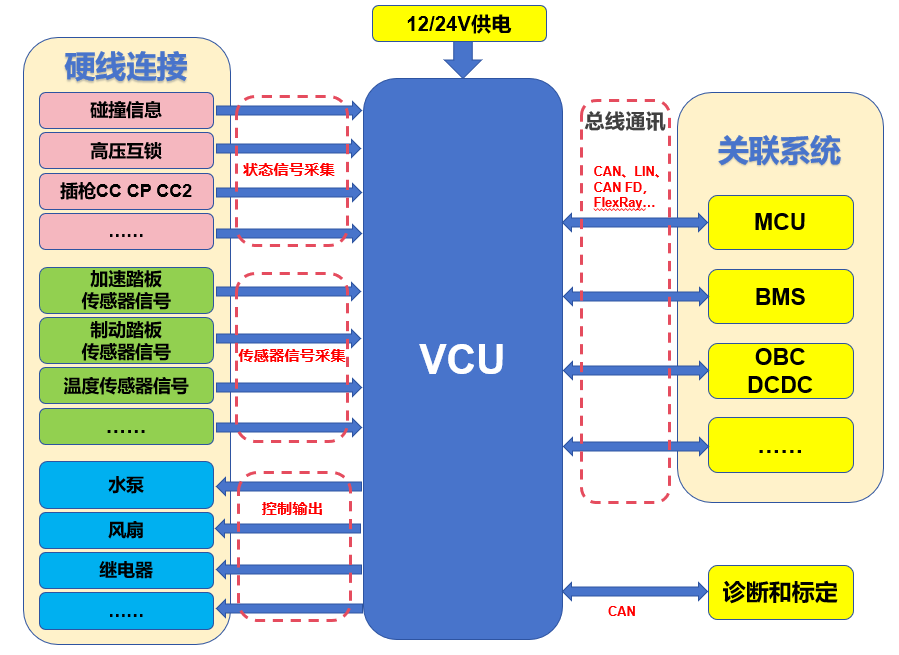
在工作过程中,VCU需要实时整合动力系统(电机、电池)、热管理、底盘控制等模块的数据,同时精准解析驾驶员的意图(通过加速踏板、制动踏板等信号输入)。基于这些信息,VCU通过总线(主要为CAN)向相关系统发送控制指令,或直接控制泵、风扇、继电器等执行部件,从而实现车辆驱动、能量回收、高压安全防护等核心功能。VCU的性能直接决定了新能源汽车的驾驶体验与安全边界,是整车智能化与可靠性的重要保障。
在过去的十余年间,我们每个人都见证了一场革命的兴起,那就是全球汽车电子电气架构的智能化革命,VCU的技术架构也随之经历了从集中式到分布式,再向域控化集成的演变。


当前主流的分布式架构采用分层控制,VCU通过CAN总线与电机控制器(MCU)、电池管理系统(BMS)等交互,实现模块化设计,便于功能扩展与维护;
未来趋势聚焦于域控化集成。例如,华为的车辆运动域控制器则融合动力与底盘控制,支持四驱扭矩分配与悬架调节,并通过SOA(面向服务架构)实现功能动态加载;比亚迪E3.0平台将VCU、MCU、BMS等整合为“八合一”电驱系统,线束长度减少30%,重量降低10%。


在软件层面,AUTOSAR 4.2标准成为开发基准,通过软硬件解耦提升代码复用率,并支持功能安全等级ASIL-C/D(如联合电子VCU8.5采用三核MCU实现双核锁步)。控制算法上,模型预测控制(MPC)被广泛用于优化扭矩分配与能耗,例如通过实时调整电机输出曲线匹配不同驾驶模式(Sport/ECO)的需求。
二、HIL系统的需求
毋庸置疑的,这些变化给整车控制器的开发和测试带来了巨大的挑战,算法功能越来越复杂,测试规范越来越严格,程序迭代越来越迅速。因此,基于模型的开发方式(Model Based Development,简称MBD)成为主流,它能够有效解决传统开发流程中的问题,提升开发效率和测试覆盖率。在部分场景下,MBD甚至是汽车算法工程师的唯一选择。
MBD的V流程开发方式如下图所示,流程左侧为系统开发,右侧为系统测试,各环节层层相扣,开发与测试相互可追溯,模型的概念贯穿于整个开发与测试流程。
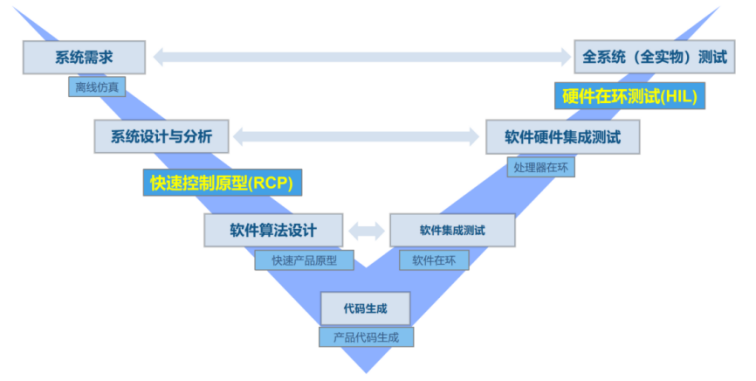
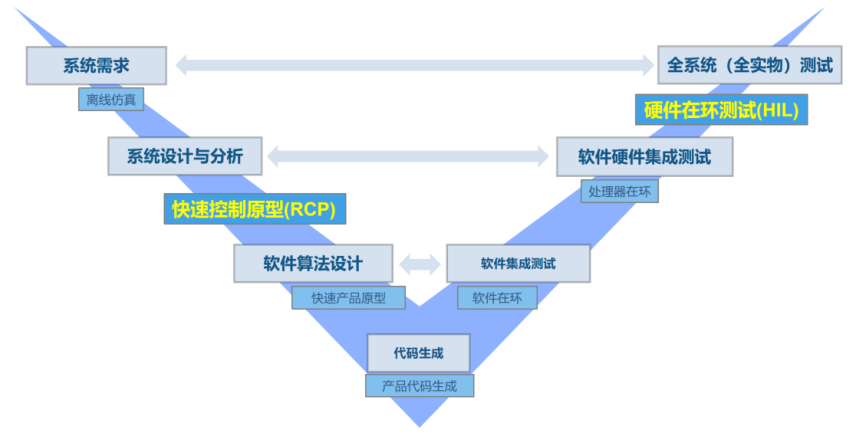
其中硬件在环测试(Hardware-in-Loop,简称HIL)是一种典型的系统测试方法,在ISO26262-6关于软件单元测试、子系统测试、集成测试章节中有明确要求。它通过构建虚拟验证环境,整合高精度车辆仿真模型及传感器信号模拟模型及接口,形成覆盖80%以上工况的数字化试验场。
使用VCU HIL系统,可以低成本地完成VCU控制器主要功能的测试,包括:整车上下电功能、车辆行车控制功能、增程器控制功能、车辆快充功能、车辆慢充功能、能量管理功能、故障诊断、网络管理等等。
该系统支持无物理损耗的短路/开路等故障模拟,配合自动化测试脚本,可并行执行数万组参数的组合验证,将传统需要数月的测试周期压缩至72小时内完成。此外,借助HIL系统,可以很轻松地集成电机控制器(MCU)、电池管理系统(BMS)等系统,实现多控制系统网络化协同测试。
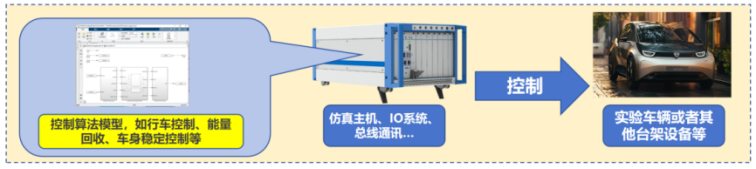
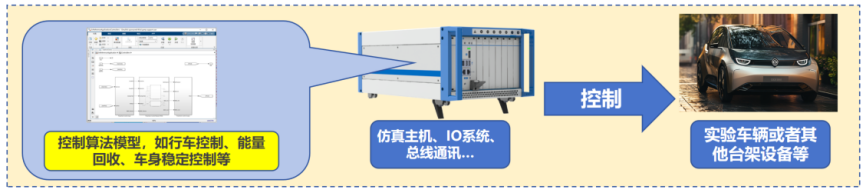
而RCP技术则截然相反,它将控制算法(如能量回收、行车控制等)快速部署到实时仿真系统的硬件平台,作为“万能控制器”进行台架测试或直接上车测试,实现了从算法模型设计到硬件实时验证的无缝衔接。这一技术大幅缩短了开发周期。
三、VCU HIL系统架构

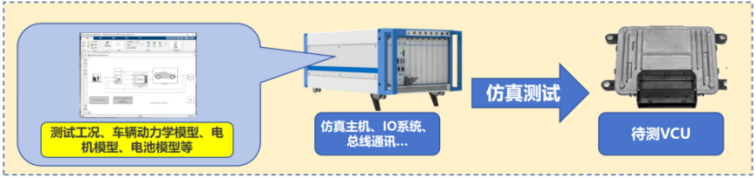
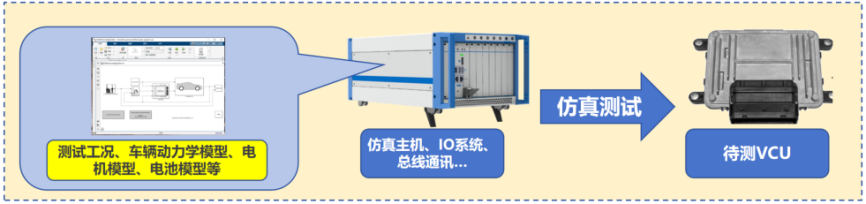
如图所示VCU HIL测试系统包括以下三部分:
01 上位机:
-
开发和编译车辆实时仿真模型,包括动力电机、动力电池、增程器、减速器、车辆动力学等模型;
-
通过试验管理软件,搭建上位机界面,实现实时在线调参,波形显示,数据记录等操作;
-
通过自动化测试软件,开发测试用例,一键测试执行,并输出测试报告;
-
部分项目中还需要使用上位机运行驾驶场景。
02 实时仿真系统:
包含实时仿真机和各种类型的IO板卡,实时仿真机运行车辆及接口模型,板卡通过线束连接控制器,实现控制器的闭环控制。
03 待测控制器:
被测试的VCU。
四、实时仿真机

实时仿真机,包括SSD、RAM和CPU,通过PCIe总线扩展模拟IO模块、数字IO模块、通信IO模块以及FPGA IO模块(在实际的VCU HIL项目中,FPGA用的其实不多),通过千兆以太网与上位机进行数据交互。
-
Intel Core/Xeon多核高性能CPU,免费开核;
-
支持并行多核,多仿真机的实时运行;
-
灵活可扩展多种IO及总线通讯模块;
-
适用于桌面及机柜式RCP&HIL应用(低噪音)。
鉴于VCU功能设计的复杂性,其PIN定义的复杂度显著高于常规控制器,这对HIL测试系统 的构建提出了更高要求。在熠速的解决方案中,我们会基于VCU的PIN定义,精准配置多种类型的IO模块和信号调理模块,以半定制化的方式开发机柜系统,以全面覆盖VCU的测试需求。
以下是VCU控制器中主要PIN类型及其功能解析:


五、车辆模型库
基于多年VCU HIL(硬件在环)项目实战经验与技术沉淀,熠速自主研发了面向整车控制器验证的高精度仿真模型库,全栈白盒化交付,深度覆盖车辆动力传动系统全链条关键部件,如动力电池模型、动力电机模型、发动机模型、变速器模型、差速器模模型、车辆动力学模型等。
以上提到的所有车辆模型,完全使用Simulink基本模块搭建,不需要第三方环境,模型完全白盒交付,高度灵活,用户可以在此基础上做二次修改。
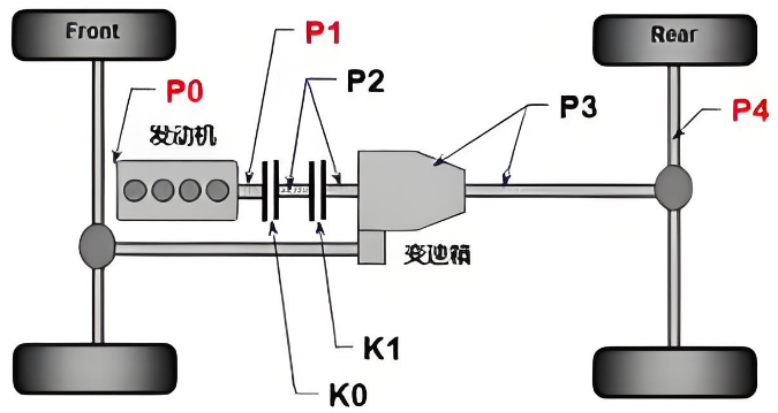
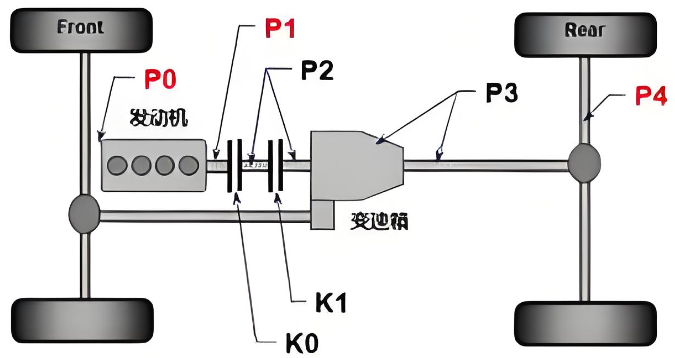
此外,针对用户不同的车辆动力架构(如纯电,混动如P0、P1、P2、P3、P4等架构)需求,熠速拥有一支经验丰富的专业模型开发团队,为客户提供高效、精准的定制化开发服务。
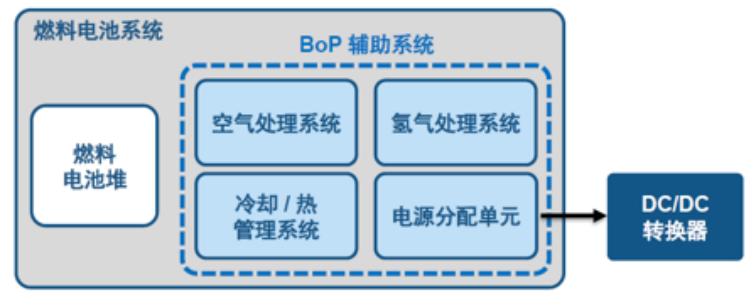
对于配置燃料电池系统的车辆,熠速也可提供Simple燃料电池系统及虚拟控制器,包含燃料电池堆、空气处理系统、氢气处理系统、热管理系统、电源分配单元以及DCDC转换单元,模拟燃料电池工作状态,以配合测试VCU控制器。

由于模型种类过于繁多,受篇幅所限,本文无法逐一展开详述。其中,动力电池模型和车载充电机模型的技术细节可参考熠速此前发布的专题推文:《OBC HIL测试系统解决方案》、《MCU HIL测试系统解决方案》。关于其他模型的技术解析,我们已规划系列专题内容,并将逐步发布,敬请期待。
六、测试结果
HIL测试的主要操作包括:连接相关信号的线束,将模型下载至实时仿真机中并运行,通过上位机发送相关指令,实时模拟测试工况,进行实时仿真测试,并实时记录相关测试数据和波形。
VCU HIL主要的测试项目如下:
-
整车上下电功能
-
车辆行车控制功能
-
增程器控制功能
-
车辆快充功能
-
车辆慢充功能
-
能量管理功能
-
故障诊断功能
-
网络管理
-
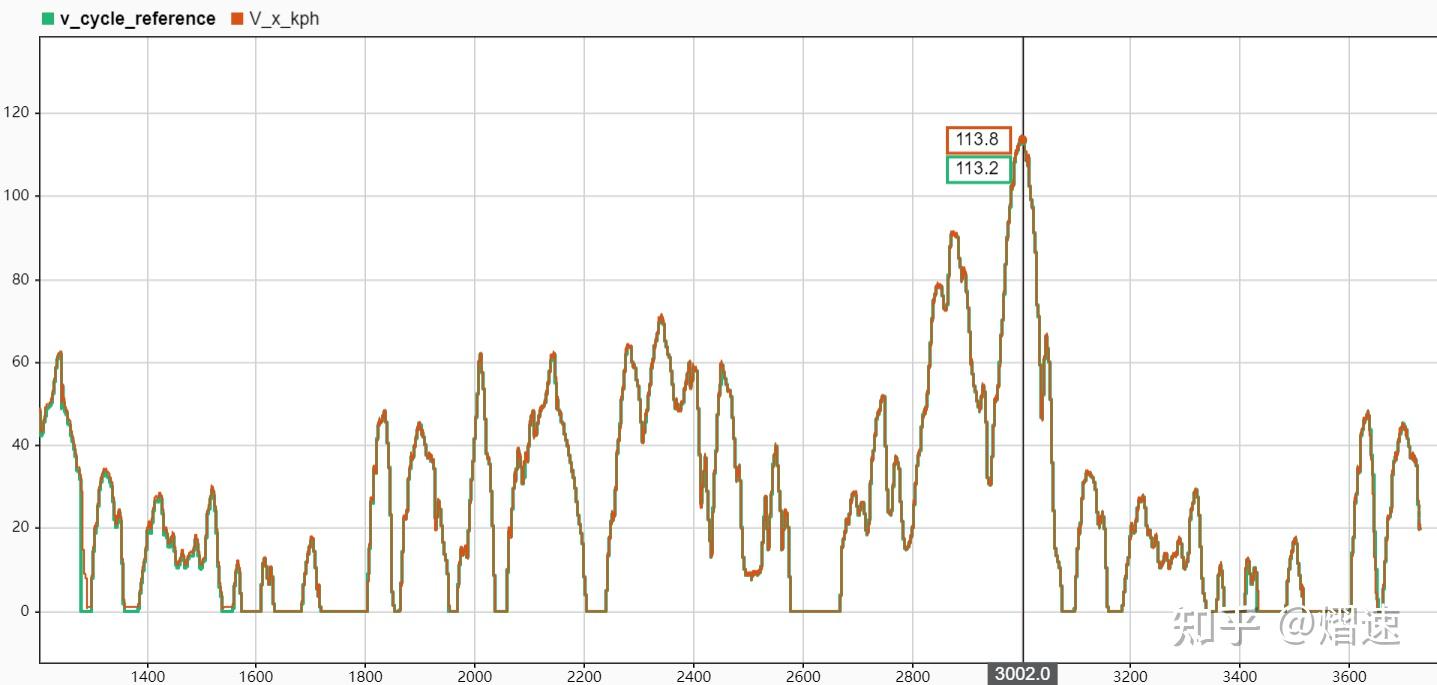
标准工况
标准工况WLTC,车辆闭环控制的速度跟随曲线如下:

如何联系我们?
上海熠速信息技术有限公司
地址:上海市松江区九亭镇九新公路877号临港卓越科技园2号楼4层
电话:021-64886750
电子邮件:info@yisuworld.com
网址:www.yisuworld.com




